Зарядная станция с автоматической ориентацией солнечных пане

Зарядная станция с автоматической ориентацией солнечных панелей
Прошлым летом я приобрел небольшой солнечный модуль. В инструкции по эксплуатации указано, что его следует ориентировать на юг с углом наклона 35°, чтобы заряжать аккумулятор на 3,7 В через модуль Solar Power Manager.
Однако, чтобы днем он всегда был направлен в сторону солнца, я решил попробовать построить полностью автоматический следящий механизм с помощью датчика освещенности и двух сервоприводов.
Как всегда, я действовал постепенно. Сначала протестировал датчик освещенности, затем сервоприводы. Затем было интересно наблюдать за взаимодействием компонентов при поиске самой яркой точки.
Самое важное было задокументировано здесь, и я надеюсь, что это вдохновит кого-нибудь на создание собственной версии.
Когда версия 1 с Arduino была готова и работала, я сразу же создал вторую версию с платой ESP32, с тем чтобы при переходе в спящий режим устройство потребляло меньше энергии и, таким образом, более эффективно заряжало аккумулятор.
Но как же измерить интенсивность света?
Наиболее эффективная длина волны для наиболее распространенных солнечных батарей лежит в видимом диапазоне спектра света. Световой поток в 1 люмен, падающий на площадь 1 м², освещает ее (в среднем) с интенсивностью 1 люкс.
Интенсивность освещенности – Википедия
Итак, сначала поиск подходящего датчика освещенности.
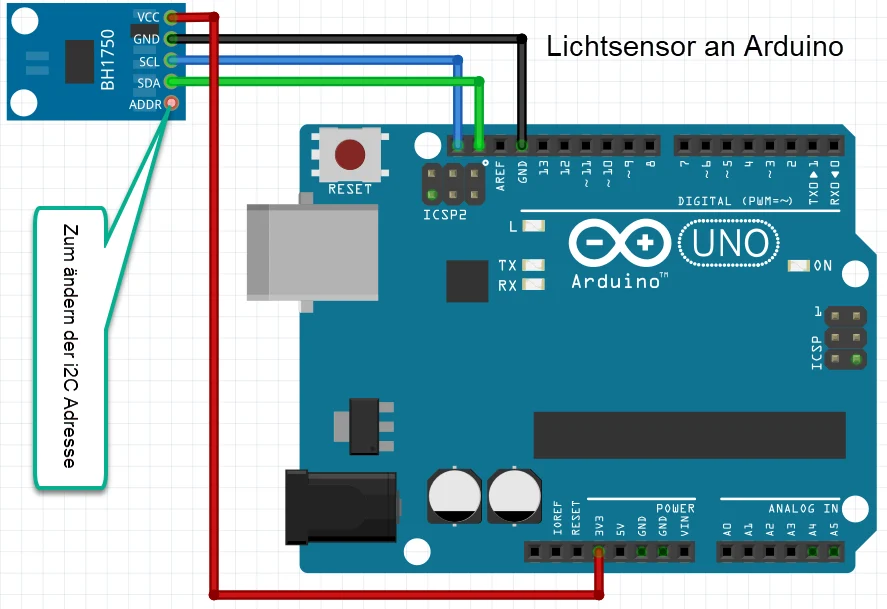
Оборудование 1: Измерение освещенности с помощью GY-30

Плата расширения датчика освещенности GY-30 / BH1750FVI оснащена фотодиодом, способным улавливать большую часть видимого света в диапазоне примерно от 400 до 700 нм. Чем ярче свет, тем выше значение освещенности в люксах, выдаваемое 16-разрядным аналого-цифровым преобразователем. Плата может выполнять как непрерывные, так и единичные измерения. Управление осуществляется через интерфейс I2C, питание — от 3,3 до 5 В.
Технические характеристики датчика освещенности GY-30
Подключение, часть 1:
Исходный код для теста датчика освещенности:
Первое измерение освещенности в люксах.
Еще одним открытием стало то, что библиотека для датчика освещенности позволяет выполнять однократное измерение, чтобы впоследствии сэкономить энергию. Однако в таком случае при каждом новом измерении необходимо вводить myLux.setOnceHighRes();. Измерение с помощью USB-тестера напряжения не показало никаких изменений. Поэтому я пока оставил это без внимания.
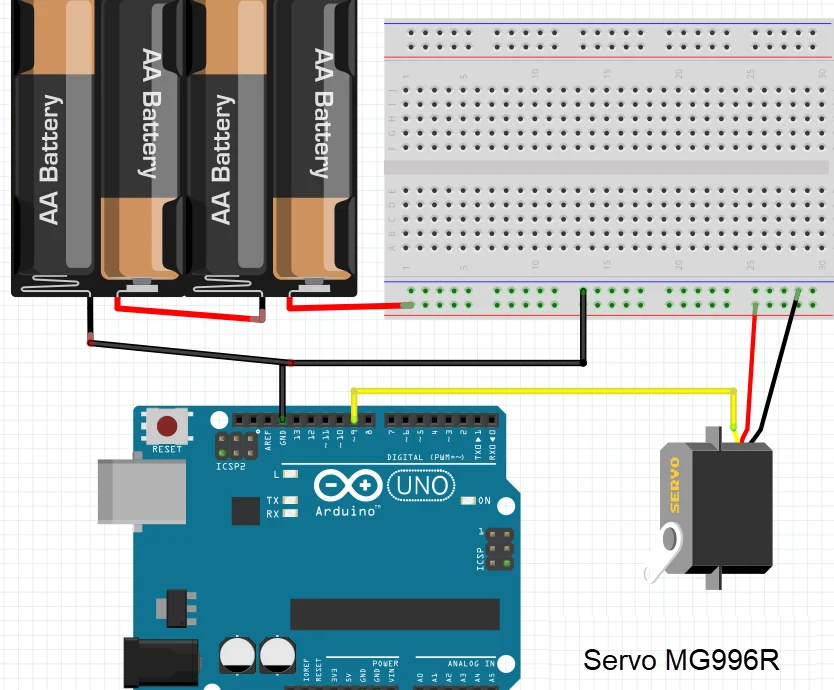
Оборудование 2: Сервопривод MG996R
MG996R — это цифровой микросервопривод, известный своим применением в дистанционно управляемых роботах, вертолетах и самолетах.
Он оснащен металлической передачей для повышенной прочности и может поворачиваться в диапазоне около 180 градусов. Его положение можно регулировать с высокой точностью.
Благодаря своей низкой стоимости и простоте в обращении он пользуется популярностью у любителей-конструкторов, и, следовательно, у меня.
Технические характеристики сервопривода
Подключение, часть 2:
Исходный код
Для начала — тест с одним сервоприводом:
Теперь тест с двумя сервоприводами:
Третье испытание:
Датчик освещенности управляет сервоприводом, GY-30 и MG996r одновременно
Теперь датчик освещенности и оба сервопривода работают вместе для первоначального горизонтального сканирования с целью нахождения самой яркой точки.
Подключение, часть 3:

Исходный код для сканирования:
Тестовое сканирование самой яркой точки по горизонтали
Тест сканирования самой яркой точки по горизонтали и вертикали
Чтобы обеспечить полное сканирование на 360 градусов с помощью 180-градусных сервоприводов, необходимо выполнить 3 цикла.
1-й проход: все углы от 0 до 180 градусов по горизонтали при 35 градусах по вертикали.
2-й проход: все углы от 0 до 180 градусов по горизонтали при 145 градусах по вертикали.
3-й проход: все углы от 0 до 180 градусов по вертикали с оптимальным значением по горизонтали.
Попробуй ускорить процесс:
Сократи время измерения после обнаружения максимального значения. (В ходе длительного тестирования этот метод не всегда эффективен в зависимости от облачности)
Пока что почти всё работает. В качестве текущей финальной версии я использую поиск оптимального угла в 3 прогонах.
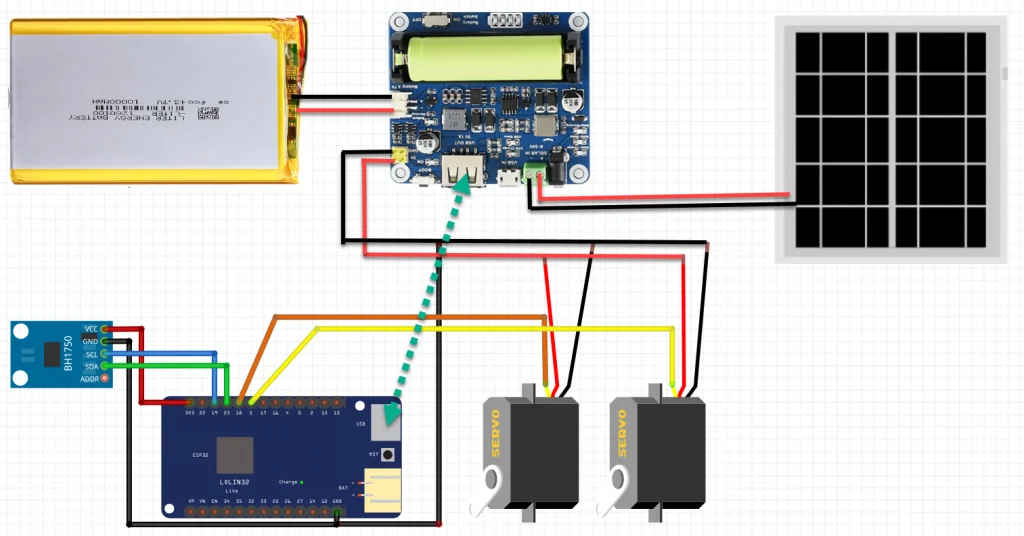
Теперь осталось подключить Servo Power Manager и аккумулятор (схема подключения показана на Lolin32) — и можно приступать к измерению потребляемого тока. Потребление Arduino составляет 0,058 А·ч.
Версия на Arduino готова.
Вторая версия с платой ESP32 Lolin32 Lite
В этой второй версии я заменил плату Arduino на Lolin32 Lite. Я хочу провести более длительное тестирование, чтобы проверить, будет ли плата без проблем работать с сервомоторами, когда она переходит в спящий режим. Первые измерения показывают, что во время «сна» потребление снижается с 0,052 Ач до 0,008 Ач.
Подключение с Lolin32 Lite:
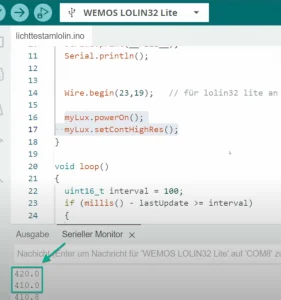
Тест датчика освещенности:
Скетч для тестирования измерения освещенности идентичен версии для Arduino; необходимо лишь добавить в функцию setup строку wire.begin() с указанием номера вывода: SDA (последовательные данные) — на вывод 23, а SCL (последовательный такт) — на вывод 19.
Исходный код теста сервопривода на Lolin32:
Вот скетч для второго теста сервопривода с использованием библиотеки esp32servo (версия 1.1.2) и для проверки, не затянут ли где-нибудь кабели или не мешают ли они.
Исходный код финальной версии от Lolin32:
Вот мой текущий финальный скетч с отключенной возможностью сокращения времени сканирования:
Финальная зарядная станция:
Поскольку в прошлые выходные было два солнечных дня без дождя, в конце дня я смог зарядить с её помощью два смартфона через разъем USB-A (5 В / 1 А).
Что мне пока не понравилось, так это то, что аккумуляторный блок находится под воздействием солнца, и эта версия подходит только для использования в хорошую погоду.
На фотографии уже видна вторая тестовая версия опорной пластины с крышкой, к которой, вероятно, еще будут добавлены боковые стенки.

Используемые библиотеки:
Для датчика освещенности с обеими платами микроконтроллера:
GitHub – RobTillaart/BH1750FVI_RT: библиотека Arduino для датчика освещенности BH1750FVI (GY-30)
Для сервопривода MG996r:
На Arduino Uno: Servo (установлена по умолчанию)
На Lolin32 Lite: esp32servo
Дополнительное оборудование:
Солнечная панель 3,5 Вт
Модуль управления солнечной энергией без аккумулятора 14500, так как емкость составляет всего 800 мАч
Аккумулятор LiPo 10000 мАч, 3,7 В с разъемом PH2.0A
Технические характеристики производителя:
Датчик освещенности GY-30
Сервопривод MG996R
Управление солнечной энергией: http://www.waveshare.com/wiki/Solar_Power_Manager
Расположение выводов Arduino:
Схема расположения выводов Arduino Uno Rev3 – Prilchen tüftelt
Расположение выводов Lolin32:
Схема расположения выводов ESP32 LOLIN32 (Lite) – Prilchen tüftelt
3D-печать:
Всего для печати требуется 5 деталей, базовая плата доступна для Arduino Uno и Lolin32 Lite.
Базовая платформа размером 20 x 20 см предоставляет дополнительное место для Solar Panel Manager и аккумулятора на 3,7 В.
Крепление для солнечной панели рассчитано на размер 13,5 x 16,5 см.
Печать выполнялась с использованием нити PETG.
Солнечная панель и MG996R_servo1 были склеены с помощью клея для ПВХ-U от Tangit. На PETG держится надежно!
Сервоприводы были закреплены прилагающимися винтами. Остальные детали — саморезами M2x4 и M2x10.
Похожие модели


")

























